
VLN-CE
github2020-04-06 更新2025-02-19 收录
资源简介:
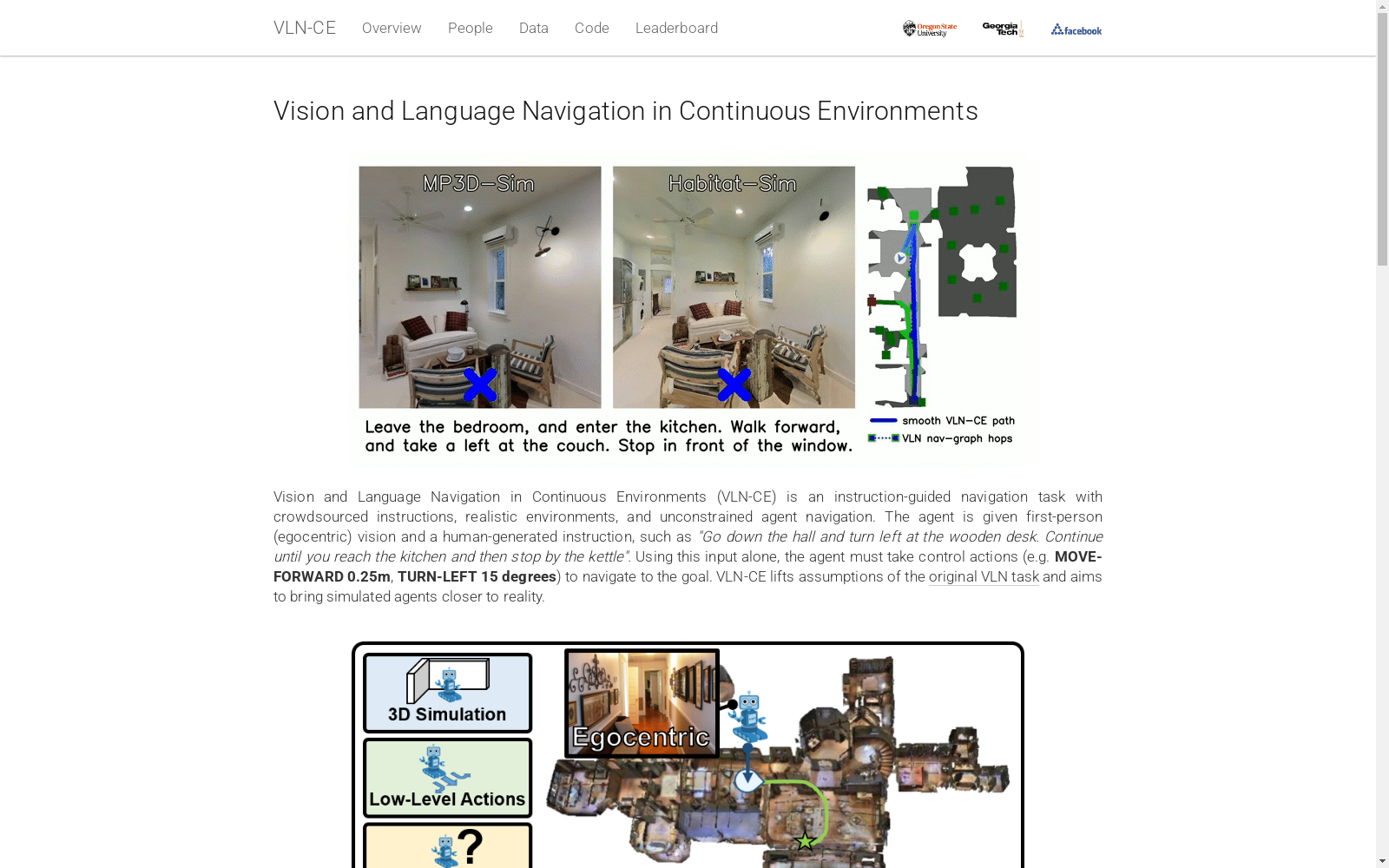
VLN-CE 数据集由 Oregon State University 和 Georgia Institute of Technology 等机构联合开发,旨在推动视觉与语言导航任务从离散导航图向连续环境的转变。该数据集基于 Matterport3D 环境构建,包含 4475 条从 Room-to-Room 数据集转换而来的导航轨迹,每条轨迹配备多条自然语言指令和低级动作序列。数据集规模可观,平均轨迹长度达 55.88 步,远超传统导航图任务。其创建过程涉及将离散导航图中的全景节点映射到连续 3D 环境,并通过 A* 搜索算法验证路径可行性。VLN-CE 数据集主要用于研究机器人在真实世界中的语言指令跟随能力,解决传统导航图假设过多导致的性能虚高问题,为机器人导航与人机交互研究提供更贴近现实的测试平台。
原始地址:
https://jacobkrantz.github.io/vlnce/
提供机构:
Oregon State University et al.
创建时间:
2020-04-06
数据集介绍
构建方式
在自然语言处理与计算机视觉的交叉领域,VLN-CE数据集的构建基于对现实世界图像与自然语言描述的融合。该数据集通过精心挑选的图像与对应的自然语言描述进行配对,确保图像内容与描述之间具有明确的视觉-语言关联。构建过程中,研究团队采用了一种复杂的多阶段筛选策略,以消除噪声数据,并利用先进的机器学习技术对数据集进行清洗和标注,从而确保了数据集的高质量和可用性。
特点
VLN-CE数据集的特点在于其独特的视觉-语言融合特性,以及数据集的高质量与多样性。它涵盖了广泛的日常场景,并提供了丰富的视觉和语言标注信息。数据集中每一幅图像都伴随着详细的自然语言描述,这不仅为研究提供了丰富的上下文信息,而且有助于推动视觉问答、图像描述生成等任务的进步。此外,数据集的构建注重平衡性,确保了各类别、场景和描述风格的均匀分布。
使用方法
使用VLN-CE数据集时,研究者可根据具体的研究目标选择相应的图像和描述数据。数据集提供了易于使用的API接口,用户可以通过简单的编程调用即可获取数据。此外,数据集的文档详细说明了数据的格式和结构,使得用户能够迅速理解并集成到自己的研究框架中。为了促进学术交流,数据集的使用还附带了一系列合规的授权协议,确保了数据的合法合规使用。
背景与挑战
背景概述
在自然语言处理与计算机视觉的交叉领域,视觉语言导航(Visual Language Navigation, VLN)成为研究热点。VLN-CE数据集,创建于近年来,由斯坦福大学等知名机构的研究人员共同开发。该数据集旨在解决虚拟环境中基于自然语言指令的导航任务,核心研究问题是如何让智能体理解自然语言指令,并在3D环境中有效执行。其研究成果对强化学习、自然语言理解以及机器人导航等领域产生了重要影响。
当前挑战
VLN-CE数据集在解决视觉语言导航领域问题中面临多重挑战:1)领域挑战包括如何准确理解自然语言指令,处理指令中的歧义,以及在复杂环境中进行有效导航;2)构建过程中的挑战主要涉及数据集的多样性、真实性和规模性,确保数据质量的同时,还需要处理数据标注的一致性和准确性问题。
常用场景
经典使用场景
在计算机视觉与自然语言处理领域,VLN-CE数据集被广泛应用于视觉问答(Visual Question Answering,VQA)任务中,其核心在于评估模型对复杂场景下视觉内容与自然语言描述相结合的理解能力。该数据集提供了丰富的图像-问题-答案三元组,使得研究者能够训练并测试模型在真实世界复杂场景下的表现。
实际应用
在现实应用中,VLN-CE数据集的成果被广泛应用于智能辅助决策系统、智能机器人交互等领域。这些系统通过集成VLN-CE数据集训练的模型,能够更好地理解和响应用户在复杂场景下的查询,提升用户体验和系统的实用价值。
衍生相关工作
基于VLN-CE数据集,学术界衍生出了一系列相关工作,如视觉语言导航、场景理解与描述生成等。这些研究进一步拓展了数据集的应用范围,推动了视觉与语言处理技术的融合与创新,对智能系统的发展产生了深远的影响。
以上内容由AI搜集并总结生成
相关数据集
未查询到数据集